目前分類:機器人 (3)
- Dec 22 Thu 2016 20:25
六足機器人 – PC端動作編輯程式

- Dec 22 Thu 2016 20:19
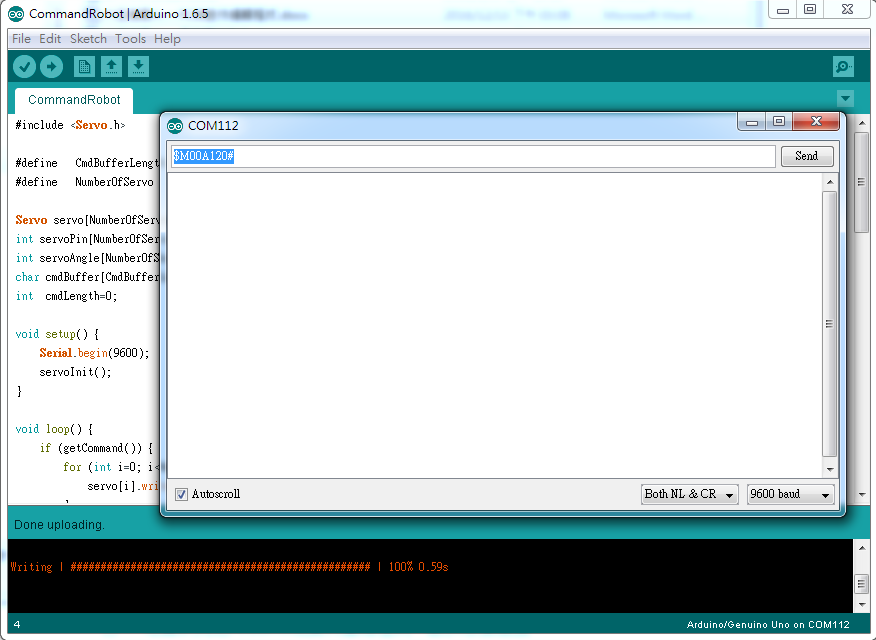
六足機器人 – 接收馬達控制指令
這是給Pizg Chen與Bridan Wang(http://4rdp.blogspot.tw/2015/12/rosa-18-p-6-x-2-spider.html)六足機器人的程式,可接收馬達控制指令,控制馬達的角度。指令的格式為 $MmmAaaa#,mm是馬達編號 (00~11),aaa是馬達角度 (000~180),例如 $M00A120# 會令馬達0轉動到120度的位置。

- Dec 22 Thu 2016 20:06
六足機器人 – 做出一個最簡單的動作
這是給Pizg Chen與Bridan Wang(http://4rdp.blogspot.tw/2015/12/rosa-18-p-6-x-2-spider.html)六足機器人做出一個動作的簡單程式,六隻腳12個馬達,分別接到servoPin[]指定的12的pin,spiderMove[]共有8個動作,每個動作有13個參數,第一個是該動作的執行時間,後面接著12個馬達的角度。loop()不斷地送出每個馬達的角度,然後休息指定的動作時間,程式非常簡單。
|
#include <Servo.h> |

